FreeRTOS Tutorial
说明
本文档主要参考正点原子的公开教程,以及FreeRTOS源码
FreeRTOS配置文件详解
相关的宏大致可以分为三类
INCLUDE:配置FreeRTOS中可选的API函数
config:完成FreeRTOS的功能配置和裁剪
其它配置项:PendSV宏定义、SVC宏定义
正点原子提供的配置文件示例:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
extern uint32_t SystemCoreClock;
/* 基础配置项 */
#define configUSE_PREEMPTION 1 /* 1: 抢占式调度器, 0: 协程式调度器, 无默认需定义 */
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1 /* 1: 使用硬件计算下一个要运行的任务, 0: 使用软件算法计算下一个要运行的任务, 默认: 0 */
#define configUSE_TICKLESS_IDLE 0 /* 1: 使能tickless低功耗模式, 默认: 0 */
#define configCPU_CLOCK_HZ SystemCoreClock /* 定义CPU主频, 单位: Hz, 无默认需定义 */
//#define configSYSTICK_CLOCK_HZ (configCPU_CLOCK_HZ / 8)/* 定义SysTick时钟频率,当SysTick时钟频率与内核时钟频率不同时才可以定义, 单位: Hz, 默认: 不定义 */
#define configTICK_RATE_HZ 1000 /* 定义系统时钟节拍频率, 单位: Hz, 无默认需定义 */
#define configMAX_PRIORITIES 32 /* 定义最大优先级数, 最大优先级=configMAX_PRIORITIES-1, 无默认需定义 */
#define configMINIMAL_STACK_SIZE 128 /* 定义空闲任务的栈空间大小, 单位: Word, 无默认需定义 */
#define configMAX_TASK_NAME_LEN 16 /* 定义任务名最大字符数, 默认: 16 */
#define configUSE_16_BIT_TICKS 0 /* 1: 定义系统时钟节拍计数器的数据类型为16位无符号数, 无默认需定义 */
#define configIDLE_SHOULD_YIELD 1 /* 1: 使能在抢占式调度下,同优先级的任务能抢占空闲任务, 默认: 1 */
#define configUSE_TASK_NOTIFICATIONS 1 /* 1: 使能任务间直接的消息传递,包括信号量、事件标志组和消息邮箱, 默认: 1 */
#define configTASK_NOTIFICATION_ARRAY_ENTRIES 1 /* 定义任务通知数组的大小, 默认: 1 */
#define configUSE_MUTEXES 1 /* 1: 使能互斥信号量, 默认: 0 */
#define configUSE_RECURSIVE_MUTEXES 1 /* 1: 使能递归互斥信号量, 默认: 0 */
#define configUSE_COUNTING_SEMAPHORES 1 /* 1: 使能计数信号量, 默认: 0 */
#define configUSE_ALTERNATIVE_API 0 /* 已弃用!!! */
#define configQUEUE_REGISTRY_SIZE 8 /* 定义可以注册的信号量和消息队列的个数, 默认: 0 */
#define configUSE_QUEUE_SETS 1 /* 1: 使能队列集, 默认: 0 */
#define configUSE_TIME_SLICING 1 /* 1: 使能时间片调度, 默认: 1 */
#define configUSE_NEWLIB_REENTRANT 0 /* 1: 任务创建时分配Newlib的重入结构体, 默认: 0 */
#define configENABLE_BACKWARD_COMPATIBILITY 0 /* 1: 使能兼容老版本, 默认: 1 */
#define configNUM_THREAD_LOCAL_STORAGE_POINTERS 0 /* 定义线程本地存储指针的个数, 默认: 0 */
#define configSTACK_DEPTH_TYPE uint16_t /* 定义任务堆栈深度的数据类型, 默认: uint16_t */
#define configMESSAGE_BUFFER_LENGTH_TYPE size_t /* 定义消息缓冲区中消息长度的数据类型, 默认: size_t */
/* 内存分配相关定义 */
#define configSUPPORT_STATIC_ALLOCATION 0 /* 1: 支持静态申请内存, 默认: 0 */
#define configSUPPORT_DYNAMIC_ALLOCATION 1 /* 1: 支持动态申请内存, 默认: 1 */
#define configTOTAL_HEAP_SIZE ((size_t)(10 * 1024)) /* FreeRTOS堆中可用的RAM总量, 单位: Byte, 无默认需定义 */
#define configAPPLICATION_ALLOCATED_HEAP 0 /* 1: 用户手动分配FreeRTOS内存堆(ucHeap), 默认: 0 */
#define configSTACK_ALLOCATION_FROM_SEPARATE_HEAP 0 /* 1: 用户自行实现任务创建时使用的内存申请与释放函数, 默认: 0 */
/* 钩子函数相关定义 */
#define configUSE_IDLE_HOOK 0 /* 1: 使能空闲任务钩子函数, 无默认需定义 */
#define configUSE_TICK_HOOK 0 /* 1: 使能系统时钟节拍中断钩子函数, 无默认需定义 */
#define configCHECK_FOR_STACK_OVERFLOW 0 /* 1: 使能栈溢出检测方法1, 2: 使能栈溢出检测方法2, 默认: 0 */
#define configUSE_MALLOC_FAILED_HOOK 0 /* 1: 使能动态内存申请失败钩子函数, 默认: 0 */
#define configUSE_DAEMON_TASK_STARTUP_HOOK 0 /* 1: 使能定时器服务任务首次执行前的钩子函数, 默认: 0 */
/* 运行时间和任务状态统计相关定义 */
#define configGENERATE_RUN_TIME_STATS 0 /* 1: 使能任务运行时间统计功能, 默认: 0 */
#if configGENERATE_RUN_TIME_STATS
#include "./BSP/TIMER/btim.h"
#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ConfigureTimeForRunTimeStats()
extern uint32_t FreeRTOSRunTimeTicks;
#define portGET_RUN_TIME_COUNTER_VALUE() FreeRTOSRunTimeTicks
#endif
#define configUSE_TRACE_FACILITY 1 /* 1: 使能可视化跟踪调试, 默认: 0 */
#define configUSE_STATS_FORMATTING_FUNCTIONS 1 /* 1: configUSE_TRACE_FACILITY为1时,会编译vTaskList()和vTaskGetRunTimeStats()函数, 默认: 0 */
/* 协程相关定义 */
#define configUSE_CO_ROUTINES 0 /* 1: 启用协程, 默认: 0 */
#define configMAX_CO_ROUTINE_PRIORITIES 2 /* 定义协程的最大优先级, 最大优先级=configMAX_CO_ROUTINE_PRIORITIES-1, 无默认configUSE_CO_ROUTINES为1时需定义 */
/* 软件定时器相关定义 */
#define configUSE_TIMERS 1 /* 1: 使能软件定时器, 默认: 0 */
#define configTIMER_TASK_PRIORITY ( configMAX_PRIORITIES - 1 ) /* 定义软件定时器任务的优先级, 无默认configUSE_TIMERS为1时需定义 */
#define configTIMER_QUEUE_LENGTH 5 /* 定义软件定时器命令队列的长度, 无默认configUSE_TIMERS为1时需定义 */
#define configTIMER_TASK_STACK_DEPTH ( configMINIMAL_STACK_SIZE * 2) /* 定义软件定时器任务的栈空间大小, 无默认configUSE_TIMERS为1时需定义 */
/* 可选函数, 1: 使能 */
#define INCLUDE_vTaskPrioritySet 1 /* 设置任务优先级 */
#define INCLUDE_uxTaskPriorityGet 1 /* 获取任务优先级 */
#define INCLUDE_vTaskDelete 1 /* 删除任务 */
#define INCLUDE_vTaskSuspend 1 /* 挂起任务 */
#define INCLUDE_xResumeFromISR 1 /* 恢复在中断中挂起的任务 */
#define INCLUDE_vTaskDelayUntil 1 /* 任务绝对延时 */
#define INCLUDE_vTaskDelay 1 /* 任务延时 */
#define INCLUDE_xTaskGetSchedulerState 1 /* 获取任务调度器状态 */
#define INCLUDE_xTaskGetCurrentTaskHandle 1 /* 获取当前任务的任务句柄 */
#define INCLUDE_uxTaskGetStackHighWaterMark 1 /* 获取任务堆栈历史剩余最小值 */
#define INCLUDE_xTaskGetIdleTaskHandle 1 /* 获取空闲任务的任务句柄 */
#define INCLUDE_eTaskGetState 1 /* 获取任务状态 */
#define INCLUDE_xEventGroupSetBitFromISR 1 /* 在中断中设置事件标志位 */
#define INCLUDE_xTimerPendFunctionCall 1 /* 将函数的执行挂到定时器服务任务 */
#define INCLUDE_xTaskAbortDelay 1 /* 中断任务延时 */
#define INCLUDE_xTaskGetHandle 1 /* 通过任务名获取任务句柄 */
#define INCLUDE_xTaskResumeFromISR 1 /* 恢复在中断中挂起的任务 */
/* 中断嵌套行为配置 */
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 /* 中断最低优先级 */
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 /* FreeRTOS可管理的最高中断优先级 */
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configMAX_API_CALL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITY
/* FreeRTOS中断服务函数相关定义 */
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
/* 断言 */
#define vAssertCalled(char, int) printf("Error: %s, %d\r\n", char, int)
#define configASSERT( x ) if( ( x ) == 0 ) vAssertCalled( __FILE__, __LINE__ )
基本变量类型
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
/* Type definitions. */
#define portCHAR char
#define portFLOAT float
#define portDOUBLE double
#define portLONG long
#define portSHORT short
#define portSTACK_TYPE uint32_t
#define portBASE_TYPE long
typedef portSTACK_TYPE StackType_t;
typedef long BaseType_t;
typedef unsigned long UBaseType_t;
#if( configUSE_16_BIT_TICKS == 1 )
typedef uint16_t TickType_t;
#define portMAX_DELAY ( TickType_t ) 0xffff
#else
typedef uint32_t TickType_t;
#define portMAX_DELAY ( TickType_t ) 0xffffffffUL
#endif
#define pdFALSE ( ( BaseType_t ) 0 )
#define pdTRUE ( ( BaseType_t ) 1 )
#define pdPASS ( pdTRUE )
#define pdFAIL ( pdFALSE )
#define errQUEUE_EMPTY ( ( BaseType_t ) 0 )
#define errQUEUE_FULL ( ( BaseType_t ) 0 )
/* FreeRTOS error definitions. */
#define errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY ( -1 )
#define errQUEUE_BLOCKED ( -4 )
#define errQUEUE_YIELD ( -5 )
任务创建和删除
总述:任务创建和删除相关API函数
xTaskCreate()-动态方式创建任务:任务的任务控制块以及任务的栈空间所需的内存,均由 FreeRTOS 从 FreeRTOS 管理的堆中分配 ;
xTaskCreateStatic()-静态方式创建任务:任务的任务控制块以及任务的栈空间所需的内存,需用户分配提供;
vTaskDelete()-删除任务:
动态创建任务
函数签名
1
2
3
4
5
6
7
8
9
10
11
12
BaseType_t xTaskCreate (
TaskFunction_t pxTaskCode, /* 指向任务函数的指针 */
const char * const pcName, /* 任务名字,最大长度configMAX_TASK_NAME_LEN */
const configSTACK_DEPTH_TYPE usStackDepth, /* 任务堆栈大小,注意字为单位 */
void * const pvParameters, /* 传递给任务函数的参数 */
UBaseType_t uxPriority, /* 任务优先级,范围:0 ~ configMAX_PRIORITIES - 1 */
TaskHandle_t * const pxCreatedTask /* 任务句柄,就是任务的任务控制块 */
)
// 返回值
// pdPASS:任务创建成功
// errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY:任务创建失败
此函数创建的任务会立刻进入就绪态,由任务调度器调度运行
动态任务创建流程
使用只需三步:
- 将宏
configSUPPORT_DYNAMIC_ALLOCATION配置为 1 - 定义函数入口参数
- 编写任务函数
动态创建任务函数内部实现
- 申请堆栈内存&任务控制块内存
- TCB结构体成员赋值
- 添加新任务到就绪列表中
深入探究:
任务控制块结构体
注意:每个任务都有属于自己的任务控制块,类似身份证
任务栈栈顶,在任务切换时的任务上下文保存、任务恢复息息相关
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; /* 任务栈栈顶,必须为TCB的第一个成员 */
ListItem_t xStateListItem; /* 任务状态列表项 */
ListItem_t xEventListItem; /* 任务事件列表项 */
UBaseType_t uxPriority; /* 任务优先级,数值越大,优先级越大 */
StackType_t *pxStack; /* 任务栈起始地址 */
char pcTaskName[ configMAX_TASK_NAME_LEN ]; /* 任务名字 */
// ...
// 省略很多条件编译的成员
} tskTCB;
/* The old tskTCB name is maintained above then typedefed to the new TCB_t name
* below to enable the use of older kernel aware debuggers. */
typedef tskTCB TCB_t;
使用示例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
#include "FreeRTOS.h"
#include "task.h"
/************************************************************/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );
/* TASK3 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );
/************************************************************/
int main( void ) {
// ...
// 使能相关硬件
//-----------创建任务-----------------
// 创建一个初始任务,由该任务创建其它任务,并删除自己
xTaskCreate( start_task, "start_task", START_TASK_STACK_SIZE, NULL, 1, NULL );
// 开启FreeRTOS的调度器,开始执行任务
vTaskStartScheduler();
return 0;
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 */
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
xTaskCreate((TaskFunction_t ) task2,
(char * ) "task2",
(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(TaskHandle_t * ) &task2_handler );
xTaskCreate((TaskFunction_t ) task3,
(char * ) "task3",
(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK3_PRIO,
(TaskHandle_t * ) &task3_handler );
vTaskDelete(NULL);
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/* 任务一 */
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
vTaskDelay(500);
}
}
/* 任务二 */
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
vTaskDelay(500);
}
}
/* 任务三,删除task1 */
void task3( void * pvParameters )
{
while(1)
{
printf("task3正在运行!!!\r\n");
if (task1_handler != NULL) {
printf("删除task1\r\n");
vTaskDelete(task1_handler);
task1_handler = NULL;
}
vTaskDelay(10);
}
}
执行结果
如果不加临界区,结果为先执行task1然后task2然后task3
这是因为创建start_task任务后,开启了调度器,此时执行start_task,它先创建了task1,task1的优先级比start_task高,所以在start_task创建task2之前就抢占了cpu运行task1,在task1阻塞期间让出了cpu回到start_task继续创建task2,后面的过程相似。
如果加了临界区,则依次创建三个任务,退出临界区之后,从优先级最高的任务开始执行
函数源码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,
const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
const configSTACK_DEPTH_TYPE usStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask )
{
TCB_t * pxNewTCB;
BaseType_t xReturn;
/* If the stack grows down then allocate the stack then the TCB so the stack
* does not grow into the TCB. Likewise if the stack grows up then allocate
* the TCB then the stack. */
// 这里是根据栈空间增长方式确定TCB的位置,确保不会因为栈增长而破坏PCB
#if ( portSTACK_GROWTH > 0 )
{
/* Allocate space for the TCB. Where the memory comes from depends on
* the implementation of the port malloc function and whether or not static
* allocation is being used. */
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );
if( pxNewTCB != NULL )
{
/* Allocate space for the stack used by the task being created.
* The base of the stack memory stored in the TCB so the task can
* be deleted later if required. */
pxNewTCB->pxStack = ( StackType_t * ) pvPortMallocStack( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
if( pxNewTCB->pxStack == NULL )
{
/* Could not allocate the stack. Delete the allocated TCB. */
vPortFree( pxNewTCB );
pxNewTCB = NULL;
}
}
}
#else /* portSTACK_GROWTH */
{
StackType_t * pxStack;
/* Allocate space for the stack used by the task being created. */
pxStack = pvPortMallocStack( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); /*lint !e9079 All values returned by pvPortMalloc() have at least the alignment required by the MCU's stack and this allocation is the stack. */
if( pxStack != NULL )
{
/* Allocate space for the TCB. */
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) ); /*lint !e9087 !e9079 All values returned by pvPortMalloc() have at least the alignment required by the MCU's stack, and the first member of TCB_t is always a pointer to the task's stack. */
if( pxNewTCB != NULL )
{
/* Store the stack location in the TCB. */
pxNewTCB->pxStack = pxStack;
}
else
{
/* The stack cannot be used as the TCB was not created. Free
* it again. */
vPortFreeStack( pxStack );
}
}
else
{
pxNewTCB = NULL;
}
}
#endif /* portSTACK_GROWTH */
if( pxNewTCB != NULL )
{
#if ( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ) /*lint !e9029 !e731 Macro has been consolidated for readability reasons. */
{
/* Tasks can be created statically or dynamically, so note this
* task was created dynamically in case it is later deleted. */
pxNewTCB->ucStaticallyAllocated = tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB;
}
#endif /* tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE */
prvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, NULL );
prvAddNewTaskToReadyList( pxNewTCB );
xReturn = pdPASS;
}
else
{
xReturn = errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;
}
return xReturn;
}
#endif /* configSUPPORT_DYNAMIC_ALLOCATION */
详解
首先定义这个宏定义
#dedfine configSUPPORT_DYNAMIC_ALLOCATION 1创建了任务控制块
TCB_t * pxNewTCB和返回值BaseType_t xReturn- 判断栈空间增长方式确定TCB的位置,确保不会因为栈增长而破坏PCB,两种情况TCB和栈空间创建顺序相反,以常用的栈向下生长为例
- 创建堆栈指针
StackType_t * pxStack,实际上这个指针指向的空间是堆空间,然后从这里面选一块作为栈空间,所以这个指针为堆空间的起始地址 - 通过
pvPortMallocStack()函数分配栈空间,注意此函数接受的参数单位为字节,而动态创建函数传入的栈空间大小单位为字,所以要×4:( ( size_t ) usStackDepth ) * sizeof( StackType_t ) - 栈空间分配成功,开始创建任务控制块TCB,分配相关内存给TCB,将栈顶指针赋值给TCB
- 创建堆栈指针
- 然后通过
prvInitialiseNewTask()函数初始化任务控制块其它成员- 根据堆栈指针将堆栈空间设置为全部写为
a5,即写入脏数据 - 将堆栈空间的最高位地址做8字节对齐,然后赋值给TCB,作为堆栈空间中栈空间的栈顶地址
- 将传入的任务名称赋值给TCB的
pcTaskName成员,名称有字符数量限制;如果没有名称则将该变量置NULL - 检查传入的任务优先级是否合法,在0~31,然后赋值给
uxPriority变量 - 通过
vListInitialiseItem()初始化任务的状态列表项,vListInitialiseItem()函数初始化任务的事件列表项 - 将状态列表项归属为TCB,设置事件列表项的优先级(32 - 任务优先级),并将该事件列表项归属为TCB
- 调用
pxPortInitialiseStack()函数初始化栈空间内容,通过向下调节栈顶指针的地址,依次写入:xPSR、PC、R12、R3、R2、R1、R0、R11、R4寄存器的值,然后将新的栈顶指针返回给栈顶指针;其中pc寄存器中存储的是该任务的任务函数指针 - 将初始化后的TCB通过强转赋值给任务句柄:
*pxCreatedTask = ( TaskHandle_t ) pxNewTCB;
- 根据堆栈指针将堆栈空间设置为全部写为
通过
prvAddNewTaskToReadyList()函数将该任务添加到就绪链表中1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84
static void prvAddNewTaskToReadyList( TCB_t * pxNewTCB ) { /* Ensure interrupts don't access the task lists while the lists are being * updated. */ // 首先进入临界区 taskENTER_CRITICAL(); { uxCurrentNumberOfTasks++; // 任务数量+1 // 判断是不是第一个任务:pxCurrentTCB指向优先级最高的任务,若无NULL则表示第一个任务 if( pxCurrentTCB == NULL ) { /* There are no other tasks, or all the other tasks are in * the suspended state - make this the current task. */ pxCurrentTCB = pxNewTCB; if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 ) { /* This is the first task to be created so do the preliminary * initialisation required. We will not recover if this call * fails, but we will report the failure. */ prvInitialiseTaskLists(); } else { mtCOVERAGE_TEST_MARKER(); } } else { /* If the scheduler is not already running, make this task the * current task if it is the highest priority task to be created * so far. */ if( xSchedulerRunning == pdFALSE ) { if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority ) { pxCurrentTCB = pxNewTCB; } else { mtCOVERAGE_TEST_MARKER(); } } else { mtCOVERAGE_TEST_MARKER(); } } uxTaskNumber++; #if ( configUSE_TRACE_FACILITY == 1 ) { /* Add a counter into the TCB for tracing only. */ pxNewTCB->uxTCBNumber = uxTaskNumber; } #endif /* configUSE_TRACE_FACILITY */ traceTASK_CREATE( pxNewTCB ); prvAddTaskToReadyList( pxNewTCB ); portSETUP_TCB( pxNewTCB ); } taskEXIT_CRITICAL(); if( xSchedulerRunning != pdFALSE ) { /* If the created task is of a higher priority than the current task * then it should run now. */ if( pxCurrentTCB->uxPriority < pxNewTCB->uxPriority ) { taskYIELD_IF_USING_PREEMPTION(); } else { mtCOVERAGE_TEST_MARKER(); } } else { mtCOVERAGE_TEST_MARKER(); } }
首先
taskENTER_CRITICAL()进入临界区uxCurrentNumberOfTasks++;任务数量+1- 判断是否为第一个任务,若为第一个则将任务控制块赋值给
pxCurrentTCB,通过prvInitialiseTaskLists()函数初始化任务列表首先初始化就绪列表(0~31,共有32个),初始化两个延时列表,初始化等待就绪列表(当需要挂起所有任务时才会使用);如果使能了删除任务,则会初始化删除任务列表,若使能了任务挂起,则会初始化任务挂起列表
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34
static void prvInitialiseTaskLists( void ) { UBaseType_t uxPriority; for( uxPriority = ( UBaseType_t ) 0U; uxPriority < ( UBaseType_t ) configMAX_PRIORITIES; uxPriority++ ) { vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) ); // 初始化就绪列表,最大是32个 } // 初始化两个延时列表 vListInitialise( &xDelayedTaskList1 ); vListInitialise( &xDelayedTaskList2 ); // 初始化**等待就绪列表** vListInitialise( &xPendingReadyList ); #if ( INCLUDE_vTaskDelete == 1 ) { // 若使能删除任务则初始化等待删除列表 vListInitialise( &xTasksWaitingTermination ); } #endif /* INCLUDE_vTaskDelete */ #if ( INCLUDE_vTaskSuspend == 1 ) { // 若使能了任务挂起,则初始化挂起列表 vListInitialise( &xSuspendedTaskList ); } #endif /* INCLUDE_vTaskSuspend */ /* Start with pxDelayedTaskList using list1 and the pxOverflowDelayedTaskList * using list2. */ pxDelayedTaskList = &xDelayedTaskList1; pxOverflowDelayedTaskList = &xDelayedTaskList2; }
若不是第一个任务,首先判断调度器是否已经启动,若未启动调度器,则会判断当前运行的任务优先级是否小于等于新创建任务的优先级,若成立,则将新创建的任务控制块赋值给当前任务控制块。
然后将新任务添加到就绪列表
退出临界区
- 若已开启任务调度器,会判断当前运行的任务优先级是否小于新创建任务的优先级,若成立,则会执行任务切换
- 结束,返回
静态创建任务
函数签名
此函数创建的任务会立刻进入就绪态,由任务调度器调度运行
1
2
3
4
5
6
7
8
9
10
11
12
13
TaskHandle_t xTaskCreateStatic(
TaskFunction_t pxTaskCode, /* 指向任务函数的指针 */
const char * const pcName, /* 任务函数名 */
const uint32_t ulStackDepth, /* 任务堆栈大小注意 字 为单位 */
void * const pvParameters, /* 传递的任务函数参数 */
UBaseType_t uxPriority, /* 任务优先级 */
StackType_t * const puxStackBuffer, /* 任务堆栈,一般为数组,由用户分配 */
StaticTask_t * const pxTaskBuffer /* 任务控制块指针,由用户分配 */
) {}
// 返回值
// NULL:失败
// 其它值:任务句柄,任务创建成功
注意:双字(double world)、字(world)、字节(byte)、半字(half-world)区别
首先字的长度在不同硬件上是不一样的,大小取决于数据总线是多少位的,一般为16、32、64位(bit)
字节的长度为8位(bit)
半字的长度为字的一半
所以在ARM中:
16位系统:16bit = 1 world = 2 half-world = 2 byte = 0.5 double world
32位系统:32bit = 1 world = 2 half-world = 4 byte = 0.5 double world
64为系统:64bit = 1 world = 2 half-world = 8 byte = 0.5 double world
静态任务创建流程
使用只需5步
- 需将宏
configSUPPORT_STATIC_ALLOCATION配置为 1 - 定义空闲任务&定时器任务的任务堆栈及TCB
- 手动实现两个接口函数:空闲任务内存分配:
vApplicationGetIdleTaskMemory( )&软件定时器任务内存分配:vApplicationGetTimerTaskMemory ( ) - 定义函数入口参数
- 编写任务函数
静态创建内部实现
- TCB结构体成员赋值(静态和动态任务创建的任务控制块内容是相似的,可以一一对应)
- 添加新任务到就绪列表中
函数源码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
typedef struct tskTaskControlBlock * TaskHandle_t;
#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode,
const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
const uint32_t ulStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
StackType_t * const puxStackBuffer,
StaticTask_t * const pxTaskBuffer )
{
TCB_t * pxNewTCB;
TaskHandle_t xReturn;
configASSERT( puxStackBuffer != NULL );
configASSERT( pxTaskBuffer != NULL );
#if ( configASSERT_DEFINED == 1 )
{
/* Sanity check that the size of the structure used to declare a
* variable of type StaticTask_t equals the size of the real task
* structure. */
volatile size_t xSize = sizeof( StaticTask_t );
configASSERT( xSize == sizeof( TCB_t ) );
( void ) xSize; /* Prevent lint warning when configASSERT() is not used. */
}
#endif /* configASSERT_DEFINED */
// 检测是否分配堆栈内存,未分配跳过返回NULL表示失败
if( ( pxTaskBuffer != NULL ) && ( puxStackBuffer != NULL ) )
{
/* The memory used for the task's TCB and stack are passed into this
* function - use them. */
// 获取任务控制块和堆栈内存地址
pxNewTCB = ( TCB_t * ) pxTaskBuffer; /*lint !e740 !e9087 Unusual cast is ok as the structures are designed to have the same alignment, and the size is checked by an assert. */
pxNewTCB->pxStack = ( StackType_t * ) puxStackBuffer;
#if ( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ) /*lint !e731 !e9029 Macro has been consolidated for readability reasons. */
{
/* Tasks can be created statically or dynamically, so note this
* task was created statically in case the task is later deleted. */
pxNewTCB->ucStaticallyAllocated = tskSTATICALLY_ALLOCATED_STACK_AND_TCB;
}
#endif /* tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE */
// 给任务控制块赋值
prvInitialiseNewTask( pxTaskCode, pcName, ulStackDepth, pvParameters, uxPriority, &xReturn, pxNewTCB, NULL );
// 初始化就绪列表
prvAddNewTaskToReadyList( pxNewTCB );
}
else
{
xReturn = NULL;
}
return xReturn;
}
#endif /* SUPPORT_STATIC_ALLOCATION */
详细流程
- 获取控制块内存(首地址)
- 获取堆栈内存(首地址)
- 标记使用的静态的方式申请的TCB和堆栈内存
- 调用
prvInitialiseNewTask()初始化任务块,并将控制块信息返回给任务句柄,以便后续返回句柄信息 - 调用
prvAddNewTaskToReadyList()添加新创建任务到就绪列表中
删除任务
用于删除已创建的任务,被删除的任务将从就绪态任务列表、阻塞态任务列表、挂起态任务列表和事件列表中移除
注意:
- 当传入的参数为NULL,则代表删除任务自身(当前正在运行的任务)
- 空闲任务会负责释放被删除任务中由系统分配的内存,但是由用户在任务删除前申请的内存, 则需要由用户在任务被删除前提前释放,否则将导致内存泄露
函数签名
1
2
void vTaskDelete( TaskHandle_t xTaskToDelete )
// 形参:xTaskToDelete - 待删除任务的任务句柄
删除任务流程
使用只需2步:
- 使用删除任务函数,需将宏INCLUDE_vTaskDelete 配置为 1
- 入口参数输入需要删除的任务句柄(NULL代表删除本身)
删除任务内部实现
- 获取所要删除任务的控制块:通过传入的任务句柄,判断所需要删除哪个任务,NULL代表删除自身
- 将被删除任务,移除所在列表:将该任务在所在列表中移除,包括:就绪、阻塞、挂起、事件等列表
- 判断所需要删除的任务:删除任务自身,需先添加到等待删除列表,内存释放将在空闲任务执行;删除其他任务,释放内存,任务数量减1
- 更新下个任务的阻塞时间:更新下一个任务的阻塞超时时间,以防被删除的任务就是下一个阻塞超时的任务
函数源码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
#if ( INCLUDE_vTaskDelete == 1 )
void vTaskDelete( TaskHandle_t xTaskToDelete )
{
TCB_t * pxTCB;
taskENTER_CRITICAL();
{
/* If null is passed in here then it is the calling task that is
* being deleted. */
// 找到要删除任务的任务控制块
pxTCB = prvGetTCBFromHandle( xTaskToDelete );
// 在相关的状态列表中移除任务
/* Remove task from the ready/delayed list. */
if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
// 判断对应优先级的就绪列表是否为0,若未空则清零对应的标志位(bit位)
taskRESET_READY_PRIORITY( pxTCB->uxPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
// 判断是否有事件列表项在等待某件事
/* Is the task waiting on an event also? */
if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL )
{
// 若没有,则移除
( void ) uxListRemove( &( pxTCB->xEventListItem ) );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Increment the uxTaskNumber also so kernel aware debuggers can
* detect that the task lists need re-generating. This is done before
* portPRE_TASK_DELETE_HOOK() as in the Windows port that macro will
* not return. */
uxTaskNumber++;
// 若要删除的任务是当前任务
if( pxTCB == pxCurrentTCB )
{
/* A task is deleting itself. This cannot complete within the
* task itself, as a context switch to another task is required.
* Place the task in the termination list. The idle task will
* check the termination list and free up any memory allocated by
* the scheduler for the TCB and stack of the deleted task. */
// 不能直接删除,先将当前任务插入到等待删除列表中
vListInsertEnd( &xTasksWaitingTermination, &( pxTCB->xStateListItem ) );
/* Increment the ucTasksDeleted variable so the idle task knows
* there is a task that has been deleted and that it should therefore
* check the xTasksWaitingTermination list. */
++uxDeletedTasksWaitingCleanUp;
/* Call the delete hook before portPRE_TASK_DELETE_HOOK() as
* portPRE_TASK_DELETE_HOOK() does not return in the Win32 port. */
traceTASK_DELETE( pxTCB );
/* The pre-delete hook is primarily for the Windows simulator,
* in which Windows specific clean up operations are performed,
* after which it is not possible to yield away from this task -
* hence xYieldPending is used to latch that a context switch is
* required. */
portPRE_TASK_DELETE_HOOK( pxTCB, &xYieldPending );
}
else
{
// 不是当前任务,直接删除
--uxCurrentNumberOfTasks;
traceTASK_DELETE( pxTCB );
/* Reset the next expected unblock time in case it referred to
* the task that has just been deleted. */
// 更新下一个任务的阻塞超时时间,防止被删除的任务就是下一个阻塞超时任务
prvResetNextTaskUnblockTime();
}
}
taskEXIT_CRITICAL();
/* If the task is not deleting itself, call prvDeleteTCB from outside of
* critical section. If a task deletes itself, prvDeleteTCB is called
* from prvCheckTasksWaitingTermination which is called from Idle task. */
if( pxTCB != pxCurrentTCB )
{
// 被删除的任务不是当前任务,则直接释放任务堆栈
prvDeleteTCB( pxTCB );
}
/* Force a reschedule if it is the currently running task that has just
* been deleted. */
if( xSchedulerRunning != pdFALSE )
{
// 若开启了调度器,且删除的是任务自身,则先切换成其他任务,后续将会在 空闲任务 中将资源回收
if( pxTCB == pxCurrentTCB )
{
configASSERT( uxSchedulerSuspended == 0 );
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
#endif /* INCLUDE_vTaskDelete */
任务调度方式
- 抢占式调度
主要针对不同优先级的任务,高优先级任务可以抢占低优先级的任务;
高优先级任务不停止,低优先级任务无法执行;
被抢占的任务会进入就绪态。
- 时间片调度
针对相同优先级的任务,多个任务的优先级相同时,任务调度器会在每一次系统时钟节拍到达的时候切换任务,一个时间片大小,取决为滴答定时器中断周期。
注意没有用完的时间片不会再使用,下一次该任务得到执行还是按照一个时间片的时钟节拍运行
任务状态
共有四种状态,除了运行态,其他三种任务状态的任务都有其对应的任务状态列表
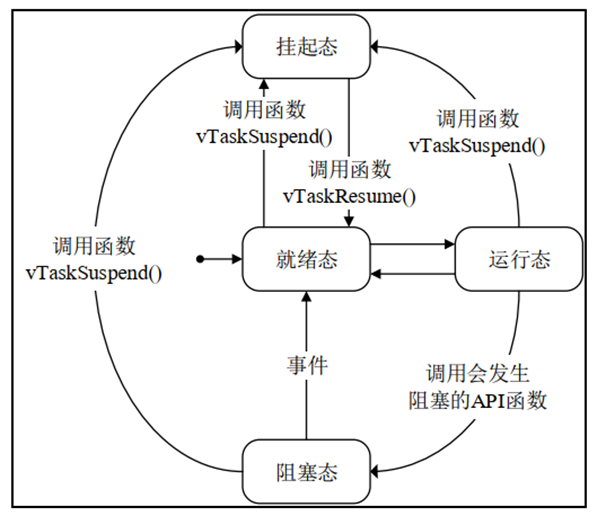
- 运行态
- 正在执行的任务,该任务就处于运行态,注意在STM32中,同一时间仅一个任务处于运行态
- 只有就绪态的任务才能转为运行态,即任务必须先进入就绪列表中,才有可能会得到执行
- 就绪态
- 如果该任务已经能够被执行,但当前还未被执行,那么该任务处于就绪态
- 阻塞态
- 如果一个任务因延时或等待外部事件发生,那么这个任务就处于阻塞态
- 挂起态
- 类似暂停,调用函数
vTaskSuspend()进入挂起态,需要调用解挂函数vTaskResume()才可以进入就绪态
- 类似暂停,调用函数